
Cuando pensamos en el correo o la paquetería, llegan a nuestra cabeza imágenes como una caja bien sellada, un sobre cubierto de estampillas (aunque jamás hayamos enviado una), y claro, el cartero. No pasaría por nuestro imaginario inmediato la llegada de un paquete en paracaídas.
Si bien, las caricaturas nos acercaron a los Sistemas de Entrega Aérea de Precisión —conocidos por sus siglas en inglés como PADS o JPADS— se trata de un método de entrega común en el ámbito militar, el cual consiste en un vehículo aéreo no tripulado que arroja el paquete desde las alturas mientras se sostiene de un paracaídas. Con fines distintos al del correo común, este sistema es utilizado para el envío de víveres, medicamentos y productos de emergencia en zonas de desastre o en lugares aislados, cuyo acceso por tierra es limitado.
El investigador y director del Departamento de Procesos Tecnológicos e Industriales, Raúl García Huerta, dedicó su tesis doctoral en Ciencias de la Ingeniería al desarrollo de algoritmos para la navegación de vehículos aéreos no tripulados, así como el estudio de su dinámica de vuelo, en especial el transporte de productos ligeros. Actualmente, es el responsable del proyecto «Sistema aéreo de entrega de cargas ligeras con navegación autónoma», cuyo equipo está conformado por los doctores Luis Enrique González e Iván Villalón, académicos del ITESO, y la colaboración externa del investigador Gerardo Allende, del Centro Aeroespacial Alemán.

«Empezó como un proyecto a cargo del profesor Javier Avalos. Pasó de ser algo experimental a ser una línea de investigación formal (…), parte de mi formación de posgrado estaba enfocada en la navegación satelital y vi en el proyecto una gran oportunidad para continuar con ello», comparte García Huerta, miembro del Sistema Nacional de Investigadores.
El proyecto busca ampliar sus usos al desarrollar un prototipo de navegación que sirva para medir parámetros atmosféricos, cargar y recuperar equipo científico valioso, así como obtener información visual por medio de cámaras. A todo esto, se añade el hecho de que este será un modelo de navegación autónomo, es decir, capaz de evaluar su condición ante las características atmosféricas y tomar las acciones necesarias para garantizar un aterrizaje seguro. «Una de nuestras tareas es fusionar información de diversos sensores con un algoritmo que permita estimar la posición y orientación del vehículo, incluso para dinámicas de vuelo complejas, utilizando pocos recursos computacionales», detalla el investigador.
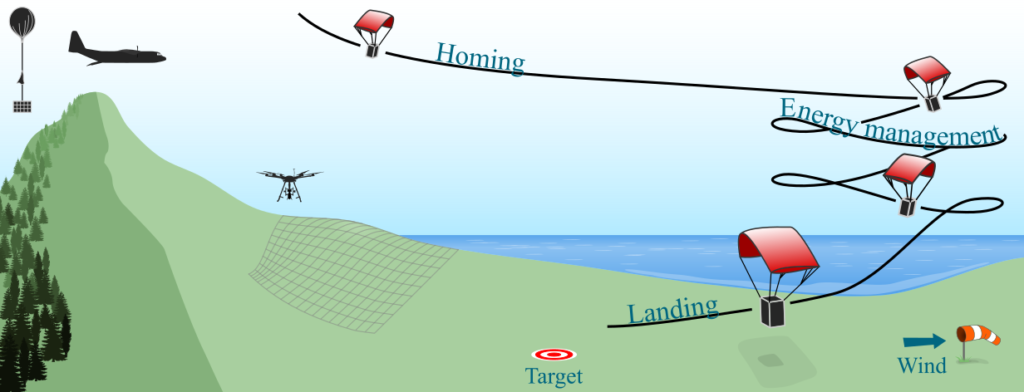
El viaje comienza cuando el paquete y el equipo de navegación (de no más de un metro de ancho) son elevados por algún vehículo, por ejemplo, por un globo meteorológico, el cual mide de uno a dos metros de diámetro y está relleno de hidrógeno o helio. Cuando el globo revienta a causa de la presión la carga cae al vacío, abre el paracaídas y el equipo comienza a navegar cambiando su geometría y atravesando el viento. El investigador señala que «lo más importante no radica con qué te elevas, ya sea un dron, un avión o un globo; sino desde dónde caes, pues eso determinará hasta dónde llegarás». La altura máxima obtenida en esta investigación ha sido de 21 kilómetros sobre el nivel del mar, por encima de los aviones comerciales y de las nubes más altas, y la distancia más larga ha sido de 72 kilómetros en un viaje que duró alrededor de dos horas.
Para lograr su financiación, este fue uno de los proyectos ganadores del Fondo de Apoyo a la Investigación en 2019 bajo la categoría de Trabajo de Obtención de Grado. Parte de los avances y resultados se han compartido en artículos como Sensor Fusion Algorithm Using a Model-Based Kalman Filter for the Position and Attitude Estimation of Precision Aerial Delivery Systems, publicado en la revista Sensors de la editorial Multidisciplinary Digital Publishing Institute, dedicada a investigaciones especializadas sobre ciencia. También han asistido a conferencias, una de ellas los llevó hasta Japón para presentar el proyecto. «Asistir a esos eventos representa una gran oportunidad para difundir, posicionarnos y crear redes con la comunidad científica».
La parte terminal de la investigación, y la cual representa múltiples retos, es el desarrollo del algoritmo que permita modelar la dinámica de vuelo del vehículo, utilizando sensores de bajo costo y baja capacidad de cómputo. Se espera que el equipo logre un aterrizaje exitoso y seguro teniendo el trayecto original como sólo una referencia. Un modelo de navegación capaz de hacerle frente a los vientos sin necesidad de un control remoto.


